B. SOMANATHAN NAIR
P. S. CHANDRAMOHANAN NAIR
ABSTRACT
In this paper, we present a very simple and
straightforward method for reducing complex-looking block diagrams. The main
advantage of this method is that the last step in the reduction process
directly gives the expression of the transfer function of the system. The
reduction process requires only an introductory knowledge of elementary
algebra.
1. INTRODUCTION
Currently
two methods are described in the Control-System literature1,2,3,4 for
reducing complex-looking block diagrams. These are, respectively, the ‘Mason’s
gain formula’ and the ‘moving-block method’.
Mason’s gain formula1,2,3
suffers from the following drawbacks:
· It becomes
difficult in some cases to identify all the feed-forward and feed-back paths.
· In several
cases, it may become difficult to identify all the closed loops in the system.
It is interesting to note that the number of closed loops in Problem 3.14 of Reference
1 is actually 4; but it was miscalculated as 3 loops in the Reference 2 (this
was corrected in Reference 1). This proves our argument.
· It is
difficult for a beginner to identify all the touching and non-touching loops in
the system.
· Identification
of co-factors is difficult in many situations.
The difficulties mentioned above will
lead to a wrong derivation of the control ratio of the system.
The second method known as 'moving-block (or summing-point)' method1,2
is also a complicated operation. The problems associated with this method
are the following:
·
It is difficult to
remember several expressions related to the moving of a block in the forward direction
and in the reverse direction past a summing point.
· For each such
movement, one has to redraw the new block-diagram configuration.
· Unless the above
operations are carefully done, this method can also lead to wrong answers.
The method described in this paper
involves no previous knowledge of any complex formulas and requires only an
elementary knowledge of algebra. The method is simple, straightforward and can be
applied easily.
2. A NEW SIMPLE
ALGEBRAIC METHOD
The first step in the new method is to identify and
name all the nodes in the block as E1, E2,
etc., where E’s
represent respective error signals. Once the nodes are named, we start writing
simple algebraic equation for each node that gives the value of the E signal of that node. The method can be
best illustrated by explaining an actual example.
Example 1: Figure 1 shows the block diagram to be reduced and
Fig. 2 shows the same block diagram with the respective nodes designated.
In Fig. 2, we find that there are
six nodes, designated as E1,
E2, E3, E4, E5,
and E6, respectively. Of
these six, we immediately recognize that node
E5 = C


We now proceed to write the
algebraic equation for each of the nodes. Thus at Node 1, we find
E1 = R ‒ C (1)
At
Node 2, the equation becomes
E2 = E1 + E5 H1 (2)
Now,
in our method, we immediately substitute for E1 from Eq. (1) into Eq. (2). Thus
E2 = R ‒ C + E5H1 (3)
At
Node 3, the equation is
E3
= G1H2 (4)
We
now substitute for E2 from
Eq. (3) into Eq. (4). Thus
E3 = G1(R ‒ C + E5H1)
= G1R ‒ G1C + E5G1H1 (5)
Now,
the equation at Node 4 is
E4 = E3 ‒ C H2 (6)
Substituting
for E3 from Eq. (5) into
Eq. (6) yields
E4 = G1R ‒ G1C + E5G1H1 ‒ C H2 (7)
Next
we have the equation for Node 5 as
E5
= E4G (8)
Now,
substituting for E4 from
Eq. (7) into Eq. (8), we get
E5 = (G1R ‒ G1C + E5G1H1 ‒ C H2)G2
=G1G2R‒G1G2C+E5G1G2H1‒CG2 (9)
Rearranging
Eq. (9), we obtain
E5(1‒G1G2H1)=G1G2R‒G1G2C‒CG2H2 (10)
from
which we get
E5=G1G2R‒G1G2C‒CG2H2 /(1‒G1G2H1) (11)
Finally
at the output node, we find
C = E6 = E5G3 (12)
Substituting
for E5 from Eq. (11) into
Eq. (12), and simplifying after manipulations, we get the control ratio

In the method described above, we have used the
technique of substituting for each of the E
functions from its previous equation. Thus equation for E2 is obtained by substituting the expression for E1, equation for E3 is obtained by
substituting the expression for E2,
and so on, until we reach the expression for C. This reduces the complexity of solving for all the equations
simultaneously in the end, and greatly simplifies the solution. As can be seen
from the procedure, the solution of the last equation yields
the control ratio C/R directly.
Example 2: Figure 3 shows the block diagram of a system slightly
more complex than the one shown in Fig. 1. In this case also, we proceed in the
same manner as was done in the case of Example 1.
In the diagram shown in Fig. 3, we
first mark all the E (error) nodes.
In this case we find that there are seven nodes. We also find that Node E7 is output node C itself.

We
now proceed to write the algebraic equation for each of the nodes. Thus at Node
1, we find
E1 = R ‒ E4 H1 (1)
At
Node 2, the equation is
E2 = G1 E1 (2)
Now,
we substitute for E1 from
Eq. (1) into Eq. (2), which yields
E2 = RG1 ‒ E4 G1 H1 (3)
At Node 3, the relation becomes
E3 = E2 +
E6 H3
(4)
Substituting
for E2 from Eq. (3) into
Eq. (4) gives
E3
= RG1 ‒ E4 G1 H1 +
E6 H3 (5)
The
equation for Node 4 can be written as
E4 = E3 G2 = RG1 G2 ‒ E4 G1 G2 H1 + E6 G2 H3 (6)
where
we have used Eq. (5). Rearranging Eq. (6), we get
E4(1‒ G1 G2 H1)
= RG1 G2 + E6 G2 H3 (7)
From
Eq. (7), we find
E4= (RG1 G2 + E6 G2 H3 ) /(1‒ G1 G2 H1)
(8)
The
equation for Node 5 is given by
E5 = E4‒ CH2 = (RG1 G2 + E6 G2 H3 ) /(1‒ G1 G2 H1) ‒ CH2 (9)
where
we have substituted for E4
from Eq. (8) to yield E5. Now,
equation for Node 6 is
E6 = G3E (10)
Substituting
for E5 from Eq. (9) into
Eq. (10) gives the expression
E6 = (RG1 G2 + E6 G2 H3 )G3 /(1‒
G1 G2 H1) ‒ G3CH2 (11)
Rearranging
Eq. (11), we have
E6 (1‒ (H3G2G3)/(1 + G1G2 H1 )
= RG1G2 G3/[(1 +
G1G2 (12)

At
Node 7, the output C can now be
written as
C =
E7 = E6 G4 (14)
Substituting
for E6 from Eq. (13) into
Eq. (14), we obtain

Rearranging
Eq. (15), we find

From
Eq. (16), we get the control ratio as

Example 3: Figure 4 shows a two-input control system. We have to
obtain the control ratios C/R and
C/D of this system.
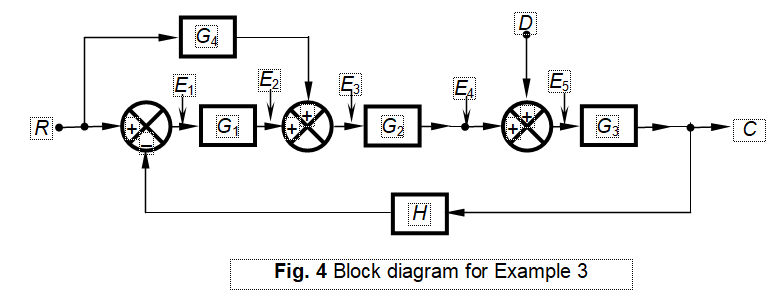
As
in the above cases, we start with Node 1. With respect to Node 1, we find
R ‒ CH = E1
(1)
At
Node 2, we have
E2 = G1E1 = (R ‒ CH)G1 (2)
Now,
with respect to Node 3, we obtain
E3 = E2+ G4R = (G1+G4)R ‒ CHG1 (3)
At
Node 4, we find
E4 = E3G2 = (G1+G4)R G2 ‒ CHG1G2 (4)
And
at Node 5,
E5 = E4 + D = (G1+G4)R G2 ‒ CHG1G2 +D (5)
Finally,
at Node 6,
C= G3 E5 = (G1+G4)R G2G3 ‒ CHG1G2 G3 +D
G3 (6)
Rearranging
Eq. (6) yields the value of C [see Eq. (7) below]

(7)
To find C/R, we must assume D = 0. Then from Eq. (7), we obtain

Similarly,
to find C/R, we must assume R = 0.
Then from Eq. (7), we obtain

3. CONCLUSION
We have demonstrated here a very simple and easy
method for finding the control ratio of complex block diagrams representing
control-system installations. It assumes no previous knowledge of finding
feed-forward or feed-back paths and other complex computations involved in the
usage of Mason’s gain formula nor does it require the remembrance of any
complicated block-moving formulas. All it requires is the usage of simple
algebra to solve the basic equation associated with each node of the system in
a systematic and step-by-step fashion.
4. REFERENCES
- Katsuhiko Ogata, Modern Control Engineering, 3rd
ed, Prentice-Hall, 1990
- Katsuhiko Ogata, Modern Control Engineering, 2rd
ed, Prentice-Hall, 1997
- Norman S. Nise, Control
Systems Engineering, 6th ed., Wiley
- C. Mei, On Teaching the
Simplification of Block Diagrams, Int.
J. of Engng. Ed, (

At
Node 7, the output C can now be
written as




No comments:
Post a Comment